Fortfahrend vom letzten mal:
In den letzten fünf Monaten seit dem letzten Blog Eintrag über dieses Projekt hat es einen beachtlichen fortschritt gegeben.
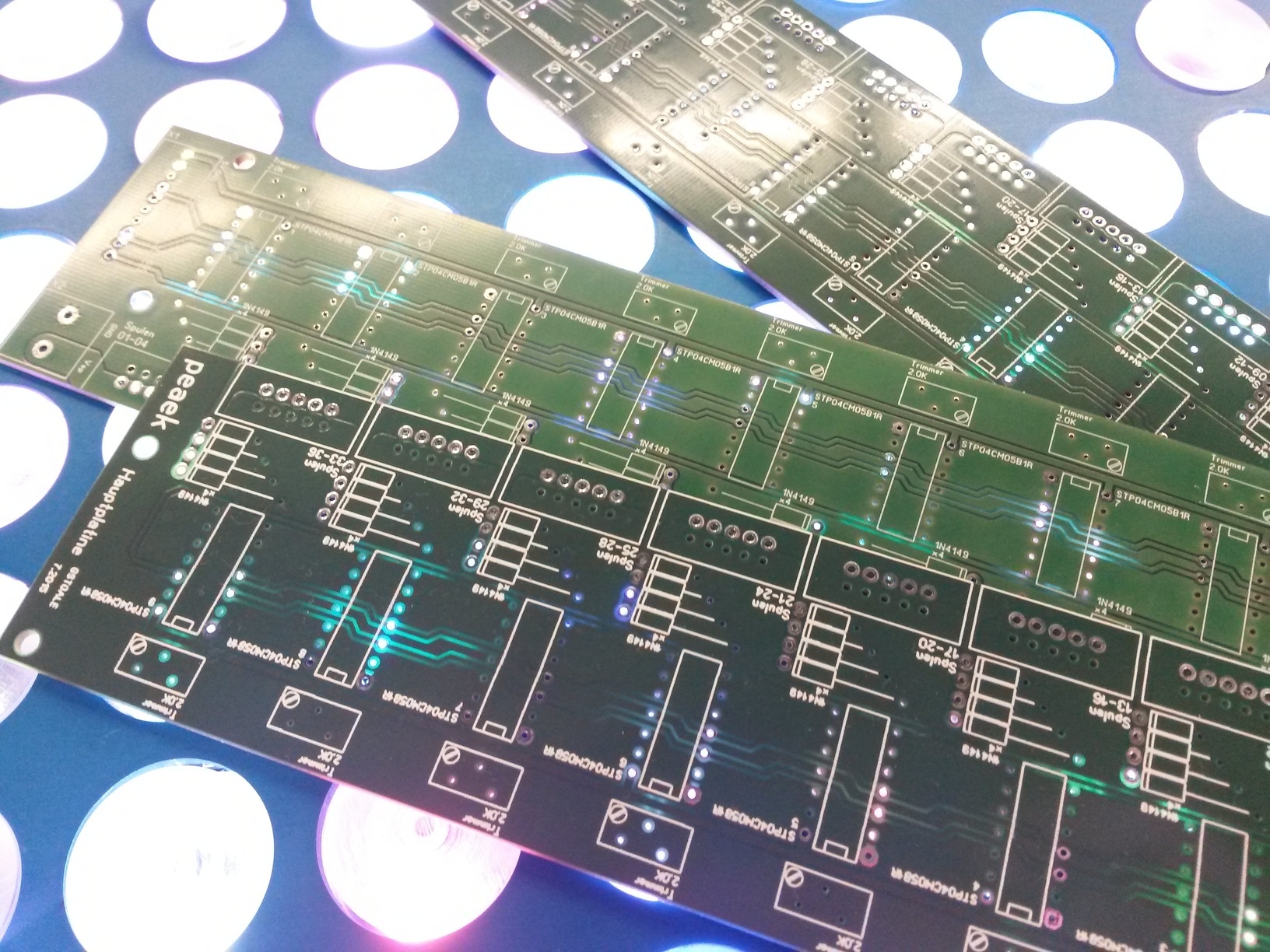
Als erstes gaben wir ihm einen Namen, wir nannten es: peæk
Es kombiniert die Wörter peek und peak. Eine Referenz zu den ausfahrenden stiften.
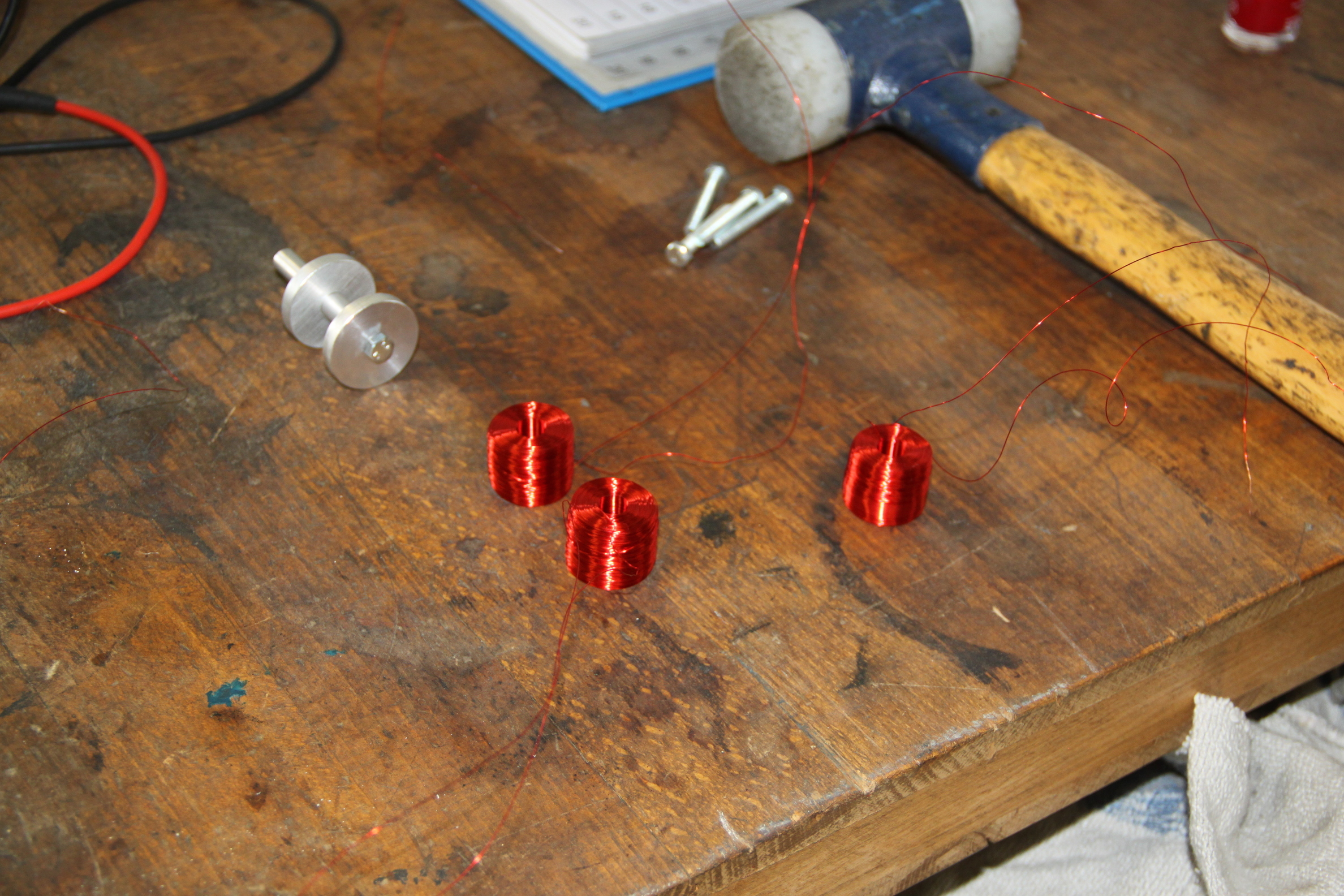
Danach fuhren wir fort die Spulen zu spulen. Eine lokale Firma hat uns das Material und die Spulmaschiene zur verfügung gestellt.
Es bedarf jedoch trotz dem mehrere Arbeitstag alle nötigen 144 Spulen die wir wollten zu drehen.


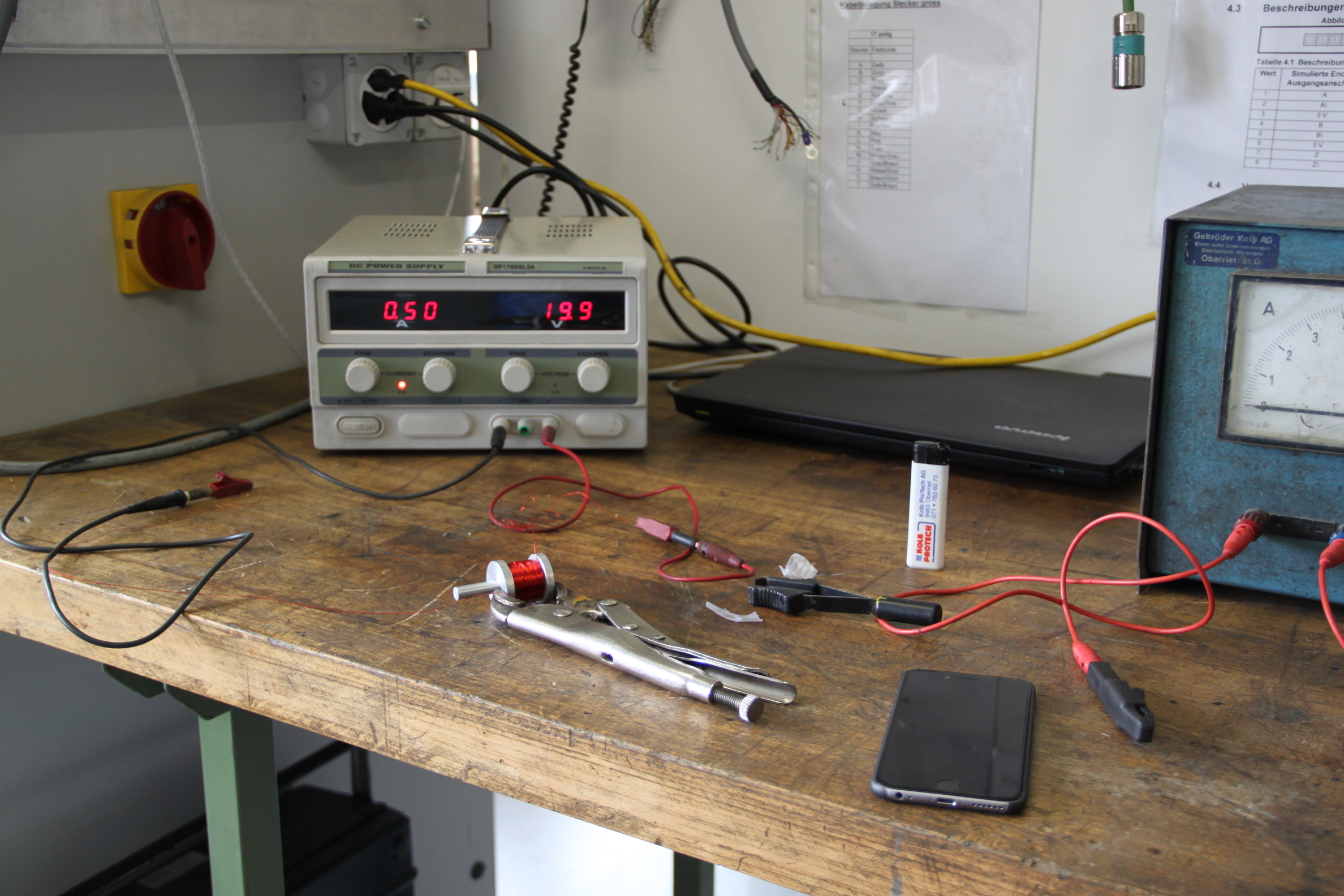
"Brennen" der Spulen:
Nach diesem schritt begann ich mit der Programmierung der gesamten Infrastruktur in C für den Arduino Mega 2560. Ich bin ziemlich stolz auf das Resultat, da es ein ziemlich komplexes System, mit vielen interagierenden teilen ist, jedoch modular und übersichtlich geblieben ist.
Ich teilen alles hier. Das ganze Ding ist 140kB vorcompiliert. Schaut euch ein wenig um.
Ich begann einige Programme für das System zu programmieren. Jedoch kam ich zum Schluss, dass ich es nicht wirklich machen könnte wenn ich es nicht sehen könnte (nicht nur das es richtig compiliert). I brauchte einen weg zu sehen was am ende herauskam.
Da die Hardware noch nicht fertiggestellt war, erstellte ich ein Interface mit Autohotkey.
Hier ist es:
http://youtu.be/4humdCxPL8Q
Es wurde ein wenig überarbeitet seit dem Video. Die Möglichkeit Inputs für die vier Knöpfe zu senden sowie eine neue Konsolenvisualisation.
Währen dessen arbeiteten die anderen Teammitglieder am mechanischen Teil des Projekts.
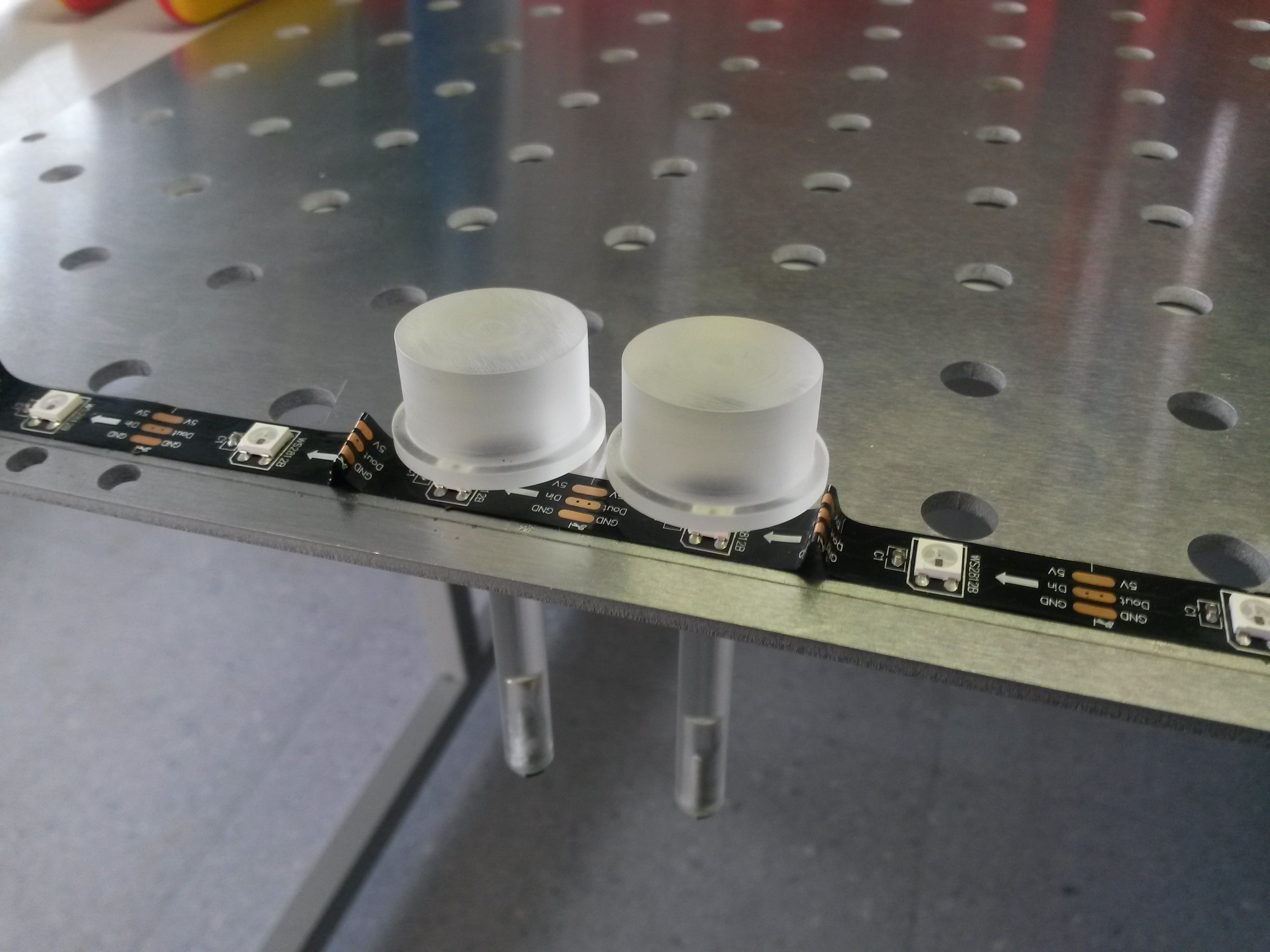
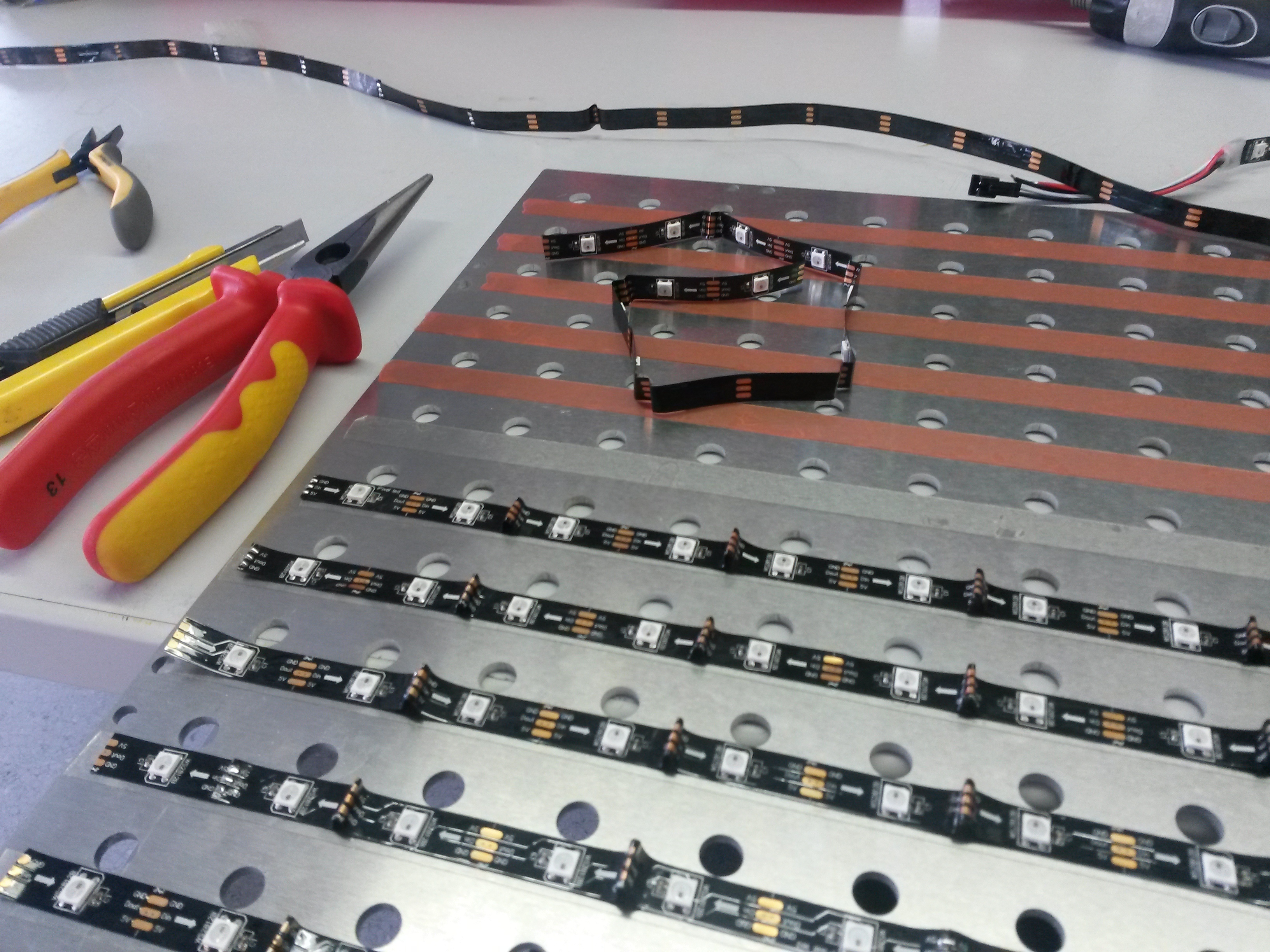
Auftragen der neoPixel auf eines dieser Teile:
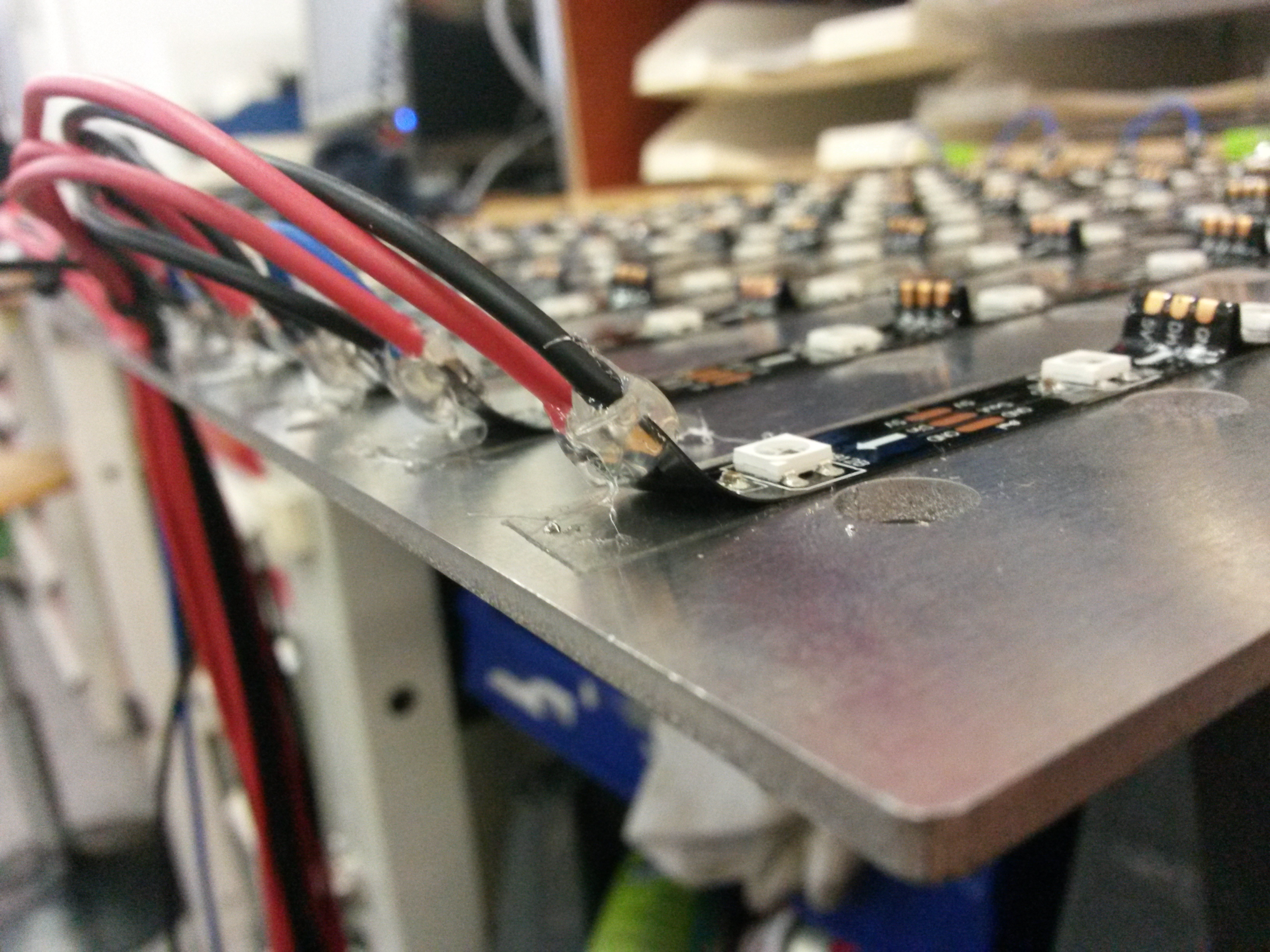
Darauffolgend bearbeitete ich die Spulenenden, alle 288. Sachrumpfschläuche und selbstschneidende Verbinder wurden angewendet. Diese würden am ende direkt auf die Treiberboards gesteckt.
Bis dahin habe ich schon das Treiberboard Layout erstellt und von jemanden kontrolieren lassen. Es gab einige Probleme mit dem Hersteller, danach mit dem layout. Leider verbrannte das viel der Reservezeit die wir bis dahin hatten.
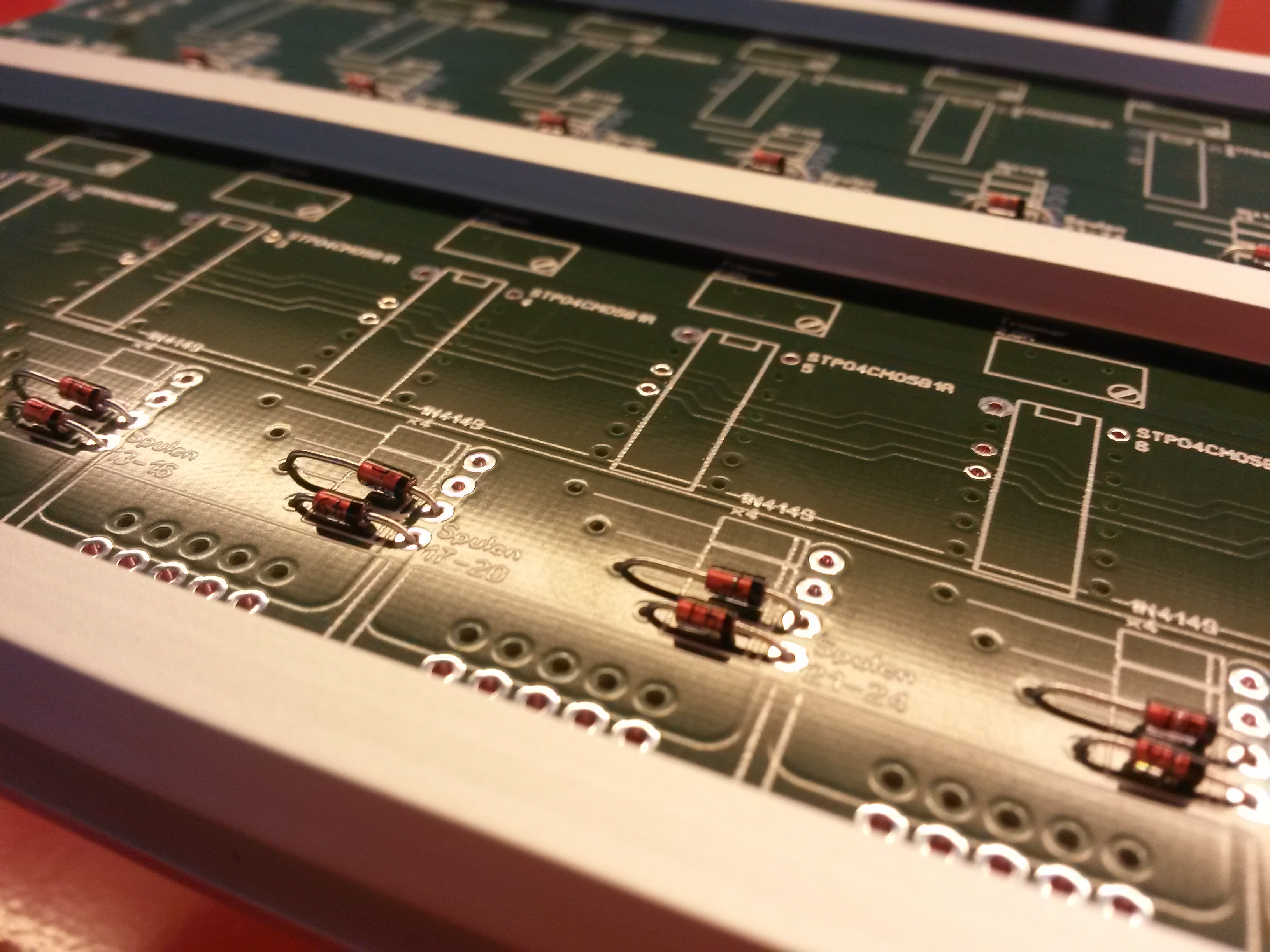
Löten der Boards:


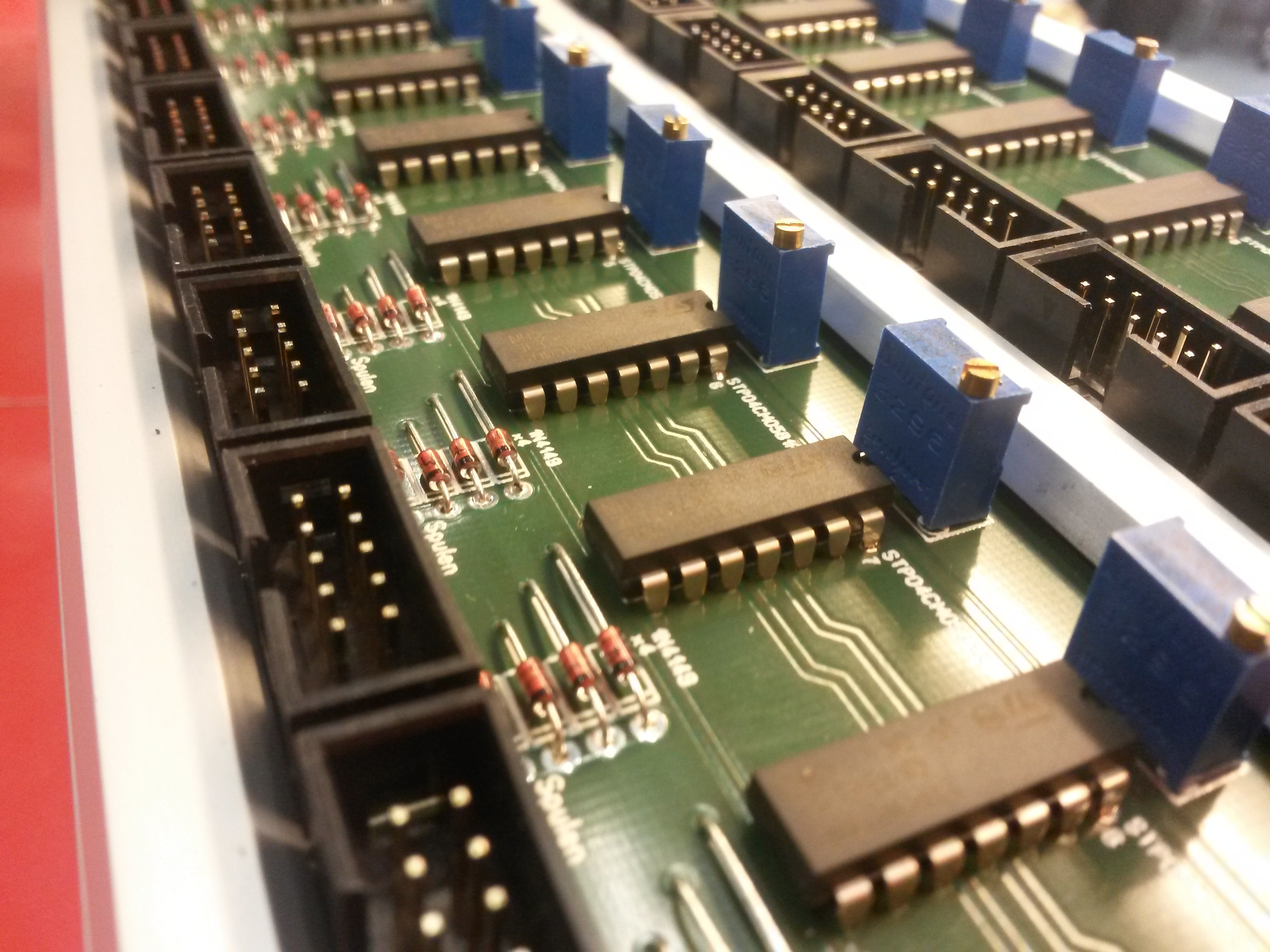
Konfigurieren der Potentiometer und einiges an testen:

Fiese Interferenzen. Es stellte sich heraus ich hätte die Leistung und Logik nicht von zwei separaten quellen speisen sollen:

Alles verdrahtet:
Kein Meisterwerk.
Die letzten drei Wochen waren ein gewaltiger Aufwand mit viel Interferenzen die mein Leben miserabel machten.
http://youtu.be/CzKxVWBvx6Q
Aber ich zog es durch und die Störungen sind beseitigt ... grösstenteils ... so 90%.
Unser 1500W Leistungsteil musste jedoch leide gehen. Und nun haben wir nur ein fünftel der benötigten Leistung. Leider sind dadurch nicht alle Muster so aufregend wie sie sein könnten. Sicherlich nicht "alle Stifte hoch".
Conway's Game of Life ... nun physisch getestet ... naja nur mit LEDs:
http://youtu.be/QFoi6p0HOwk
Nachdem die gesamte Programmierarbeit beendet war hatte es sogar Snake.
http://youtu.be/DvUOrBbF3KE
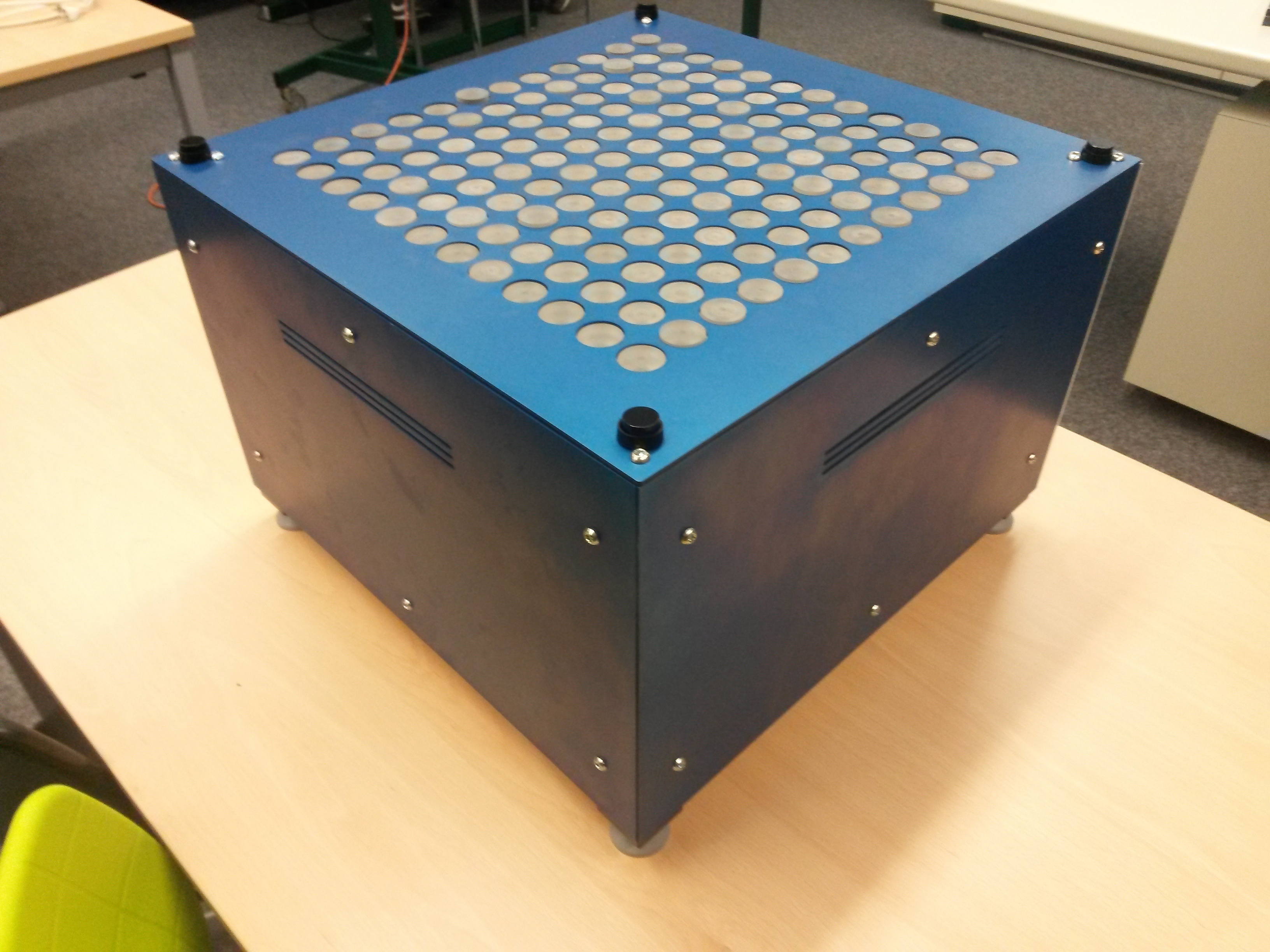
Schlussendlich assembliert:


http://youtu.be/-sarv1L_MU8
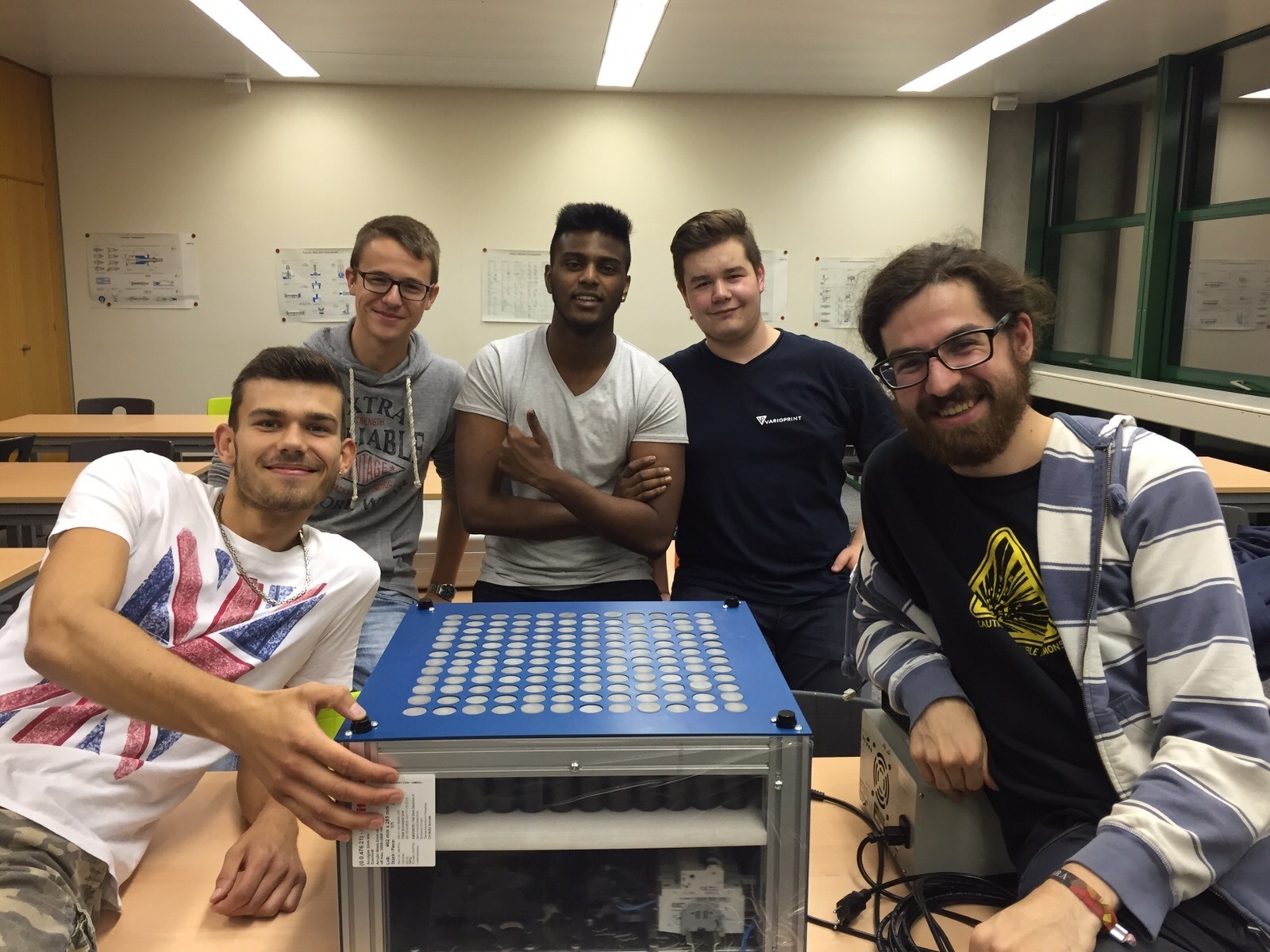
Dies war diesen Dienstag (25.08.2015). Das bin ich, dieses wochenende (28-29.08.2015) an der "Ostschweizer Bildungs Austellung", wo Besucher hingehen um sich zu Informieren was für eine Lehre sie nach der Schule beginnen sollten, was für eine weiterführende Schule sie besuchen sollten oder was für Kurse sie nehmen sollten.

Zwei Kinder am Snake spielen:

Funktionierendes Interface:

Ein grossartiges Projekt, alle waren motiviert, es war technisch anspruchsvoll und die Initiatoren drückten uns in keine Richtung sonder liessen uns unseren eigenen Weg finden.
Am Ende funktionierte es nicht 100%, aber die meisten der anderen Projekten taten es auch nicht, am ende sind es alles Prototypen.
Nummer eins Ding, neben den ganzen Fähigkeiten, die ich von dieser Zeit gelernt habe: Bau es Robust, selbst wenn es nur ein Prototyp ist. Ein falscher tritt und die ganze weisse platte wäre herunter gerollt, hätte die ganze Elektronik und Drähte zerstört ... ich bin sehr froh das dies nicht geschehen ist.